ROS 命令行工具介绍 ROS/Kinetic 发布于:2019年10月18日 字数:43字 时长:1分钟 命令 解释 roscore 用来开启ros master rosnode 用来打印节点信息 rosrun 用来运行节点 rosmsg 用来显示 msg 数据 rossrv 用来显示 srv 数据
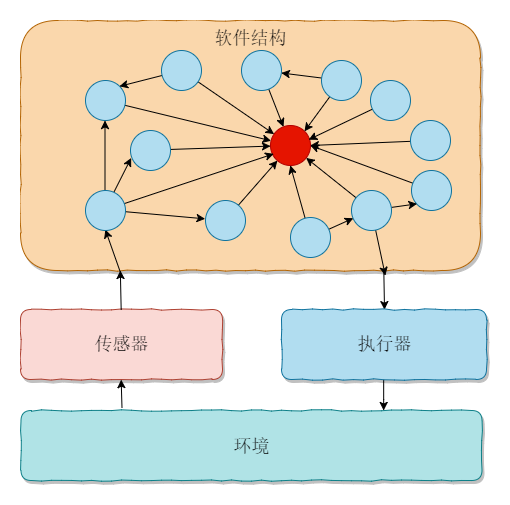
ROS 概述 ROS/Kinetic 发布于:2019年10月18日 字数:669字 时长:2分钟 ros的基础架构 ROS 项目在部署运行的过程中,大致分为4个部分: 环境 软件环境 硬件环境 执行器 给操作系统发送一些指令,以此来控制硬件执行相应操作 传感器 传感器接收外部环境给的输出,反馈给相应的软件 软件结构 ros 一个可执行程序,就是一个节点 ros master用来管理各个节点 阅读全文